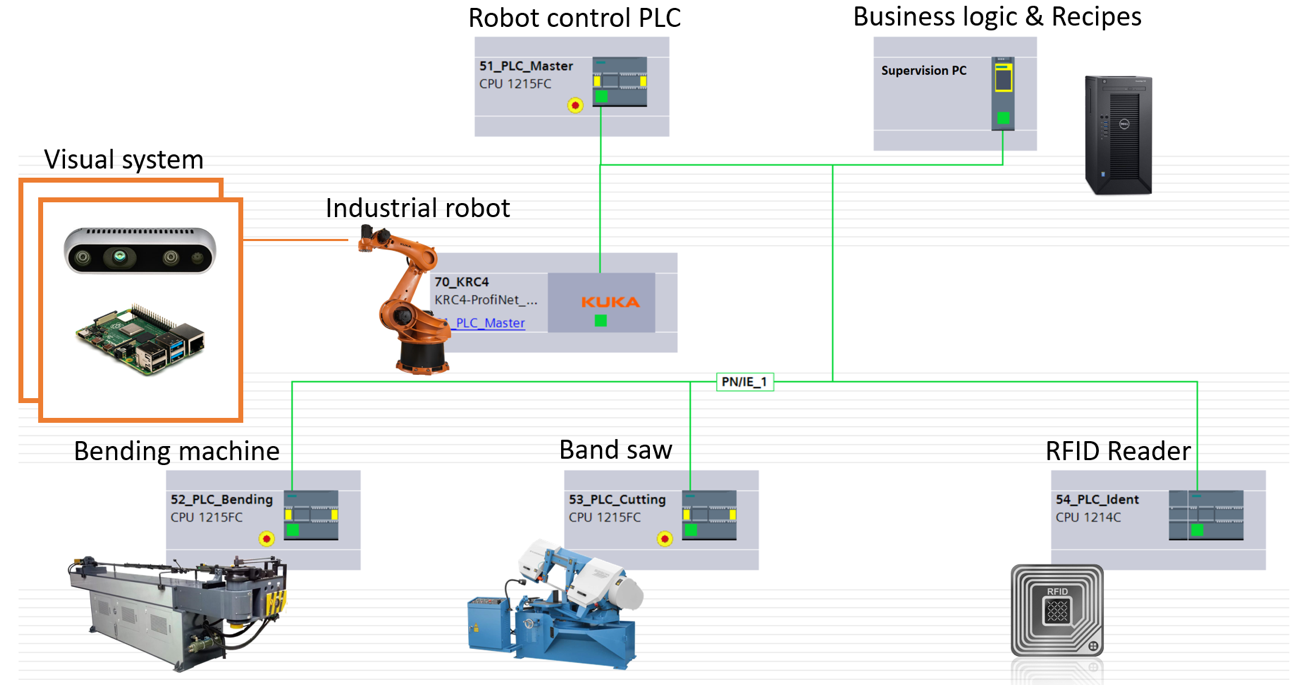
ALTER within the MIDIH experiment enhanced a robotized pipe bending cell with AI-based capabilities based on the MIDIH Reference Architecture. Two main areas of improvement were targeted:
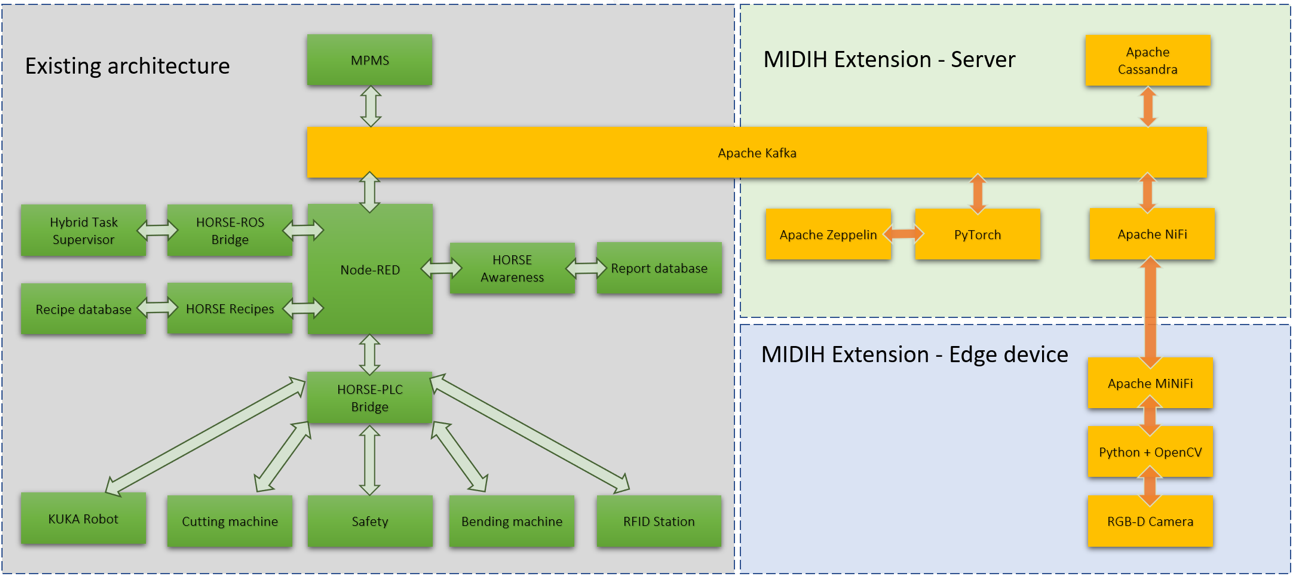
The original workcell has been developed using the HORSE Software Framework and the foreseen improvements had to be incorporated without reengineering the whole solution. Therefore, ALTER had an ambitious goal of integrating two software frameworks targeting different aspects of Industry 4.0. This has been accomplished by replacing the HORSE middleware with Apache Kafka belonging to the Apache toolchain of the MIDIH Reference Architecture.
The proposed solution involved both the server-side and edge deployment. The first focuses on the long-term learning, stock optimization, and data registration and storage. The latter is responsible for RGB-D image registration and near real-time processing necessary to control the robot – raw material identification and localization of the grasping point. Finally, additional components, not belonging to neither of the frameworks, had to be integrated to provide the required functionalities – OpenCV+Python has been used to control the RealSense RGBD camera and pyTorch has been used to develop the learning-based capabilities of the system.
IGIT, as a technology provider will continue the development with the main goal of increasing the accuracy of grasping and the efficiency of the long term raw materials planning component. Companies involved within experiment see the commercial benefits of the developed solution. Once the system is completed it will significantly enhance the portfolio of products. We expect at least 30% increase in the number of new customers. Since the developed product will be exploited with a higher margin profit than the integration services we expect proportionally higher growth of revenues.